
Menu
発明情報
08944
86%減の消費費力でロボットの動作情報を生成できる情報処理装置及び情報処理方法
模倣学習にてロボットを操作する場合、従来より29%減の計算処理回数及び86%減の消費費力でロボットの動作情報を生成できる情報処理装置及び情報処理方法を提供します。
背景
従来の模倣学習では、ロボットが画像中の限定された「点」にのみ注意を向ける空間注意点を用いて動作を生成していました。しかし、特徴量マップの重心(平均値)のみを空間注意点として抽出する方式であったため、空間的な情報が大きく圧縮され、得られる情報量が限定的でした。その結果、不足する情報を補うために多数の特徴量マップを用いる必要があり、計算量の増大を招いていました。
発明概要と利点
対象物を含む画像を取得し、その画像から空間注意点特徴量を含む特徴量マップを抽出します。さらに、その特徴量マップに基づいて空間注意点特徴量分布の高次モーメントを算出し、その高次モーメントに基づきロボットの動作情報を生成します。これらの処理をコンピュータによって実行します。図1は本発明の学習モデル構成を示しています。
◆発明の利点
図2は本発明のロボットによるタスクにおける空間注意数とタスク成功率の関係の一例を示す図です。図2は本発明のロボットによるタスクにおける空間注意数とタスク成功率の関係の一例を示す図です。本発明の空間注意数が2の場合、空間注意点エンコーダにおけるMAC(Multiply-Accumulate)演算量は25.8M となり、比較例(空間注意数10、36.3M)と比べて約28.9% 削減できます。さらに、タスク成功率をほぼ同程度に維持しつつ、消費エネルギーを約86% 削減できます。
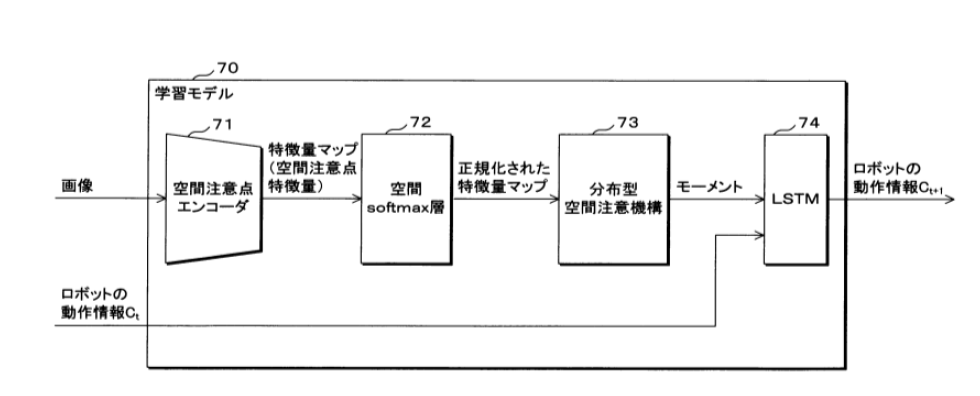
図1 本発明の学習モデルの構成図
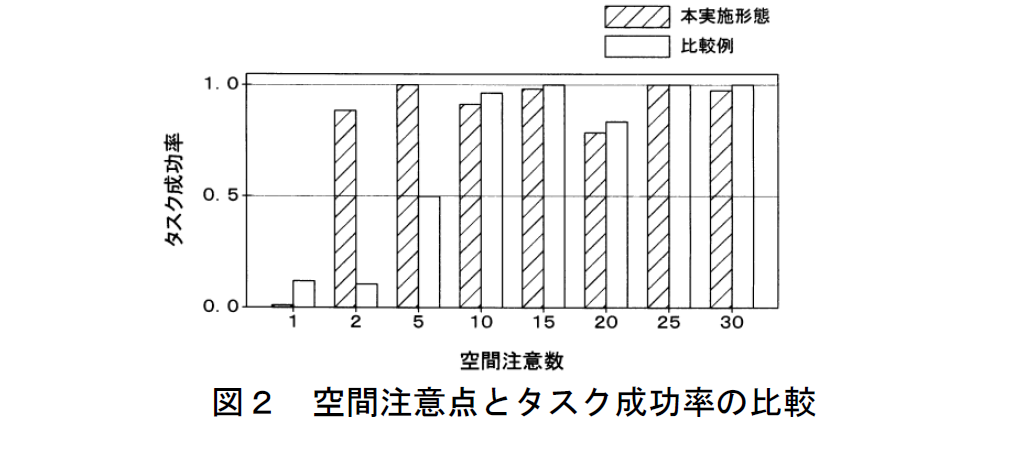
図2 空間注意点とタスク成功率の比較
| 開発段階 | 研究室での試作品にて効果を確認済です。 |
|---|---|
| 希望の連携 | •実施許諾 •オプション(非独占/独占) •共同研究 ※本発明は京都大学から特許出願中です。 |
| 関連リンク | PDFで見る |

〒606-8501
京都市左京区吉田本町
京都大学 国際科学イノベーション棟3階